Wirbelschleppenmessungen an Windturbinen mittels unbemanntem Flugsystem in Windpark in Dänemark.

Hintergrund
Ein Forschungsprojekt der Universität Aalborg in Dänemark befasst sich mit dem Transport von Ersatzteilen mittels unbemanntem Flugsystem zu Offshore-Windkraftanlagen, und dies auf direktem Weg vom Versorgungshafen zur Gondel der Windturbine. Wenn das neue System erfolgreich ist, würde es den Transport der Teile per Schiff, gefolgt von dem langsamen und umständlichen Hochkranen der Teile zur Gondel ersetzen. Ziel ist es, sowohl die Kosten als auch die Betriebsbeeinträchtigung der Windturbine deutlich zu reduzieren.
Da Windturbinen normalerweise an windreichen Orten stehen und die Ersatzteilanlieferung im Idealfall keine Turbinenabschaltung erforderlich macht, sind wir vor vielfältige Herausforderungen gestellt. Die Universität Aalborg bat FT um Hilfestellung bei der Sicherheitseinschätzung eines Drohneneinsatzes unmittelbar über der Gondel bei weiterhin umlaufenden Rotorblättern und starken Windturbulenzen.
Projekt
Um die Windverhältnisse direkt am Standort des unbemannten Flugsystems zu bestimmen, kaufte die Universität Aalborg einen Sensor FT742-SM und montierte ihn zunächst auf eine „kleinere“ Drohne vom Typ DJI Matrice 600 und anschließend auf dem Flugsystem, das im Laufe des Forschungsprojektes Testzustellungen durchführen sollte – eine 90 kg schwere Rotor-Drohne.
Zu Anfang wurde aus zwei Gründen die Drohne M600 eingesetzt. Ursprünglich war nicht ganz klar, worauf man sich beim Schweben nur wenige Meter über der Gondel einer 100 m hohen 6 MW Windturbine, 5 m hinter den rotierenden Rotorblättern bei Windgeschwindigkeiten von über 20 m/s gefasst machen musste. Daher entschieden sich die Forscher zunächst für eine relativ kostengünstige Drohne. Zweitens ermöglichte die Multirotor-Ausführung die Positionierung des Windsensors oberhalb der Wirbelschleppe der Rotoren, welche andernfalls die Windmessung beeinträchtigt hätte. Um Ergebnisse zu bekommen, wurde der Sensor am Ende einer 50 cm langen Aluminiumstange befestigt und allmählich dichter an die Gondel herangeflogen.
Das Video zeigt:
Oben links: Die Lage des Flugsystems.
Oben rechts: Unterschiedliche Betätigung der Drohnenmotoren vorne/hinten sowie links/rechts.
Unten links: Windgeschwindigkeit in m/s (blau) und Windrichtung (lila) gemessen mit FT742-SM. Die Windgeschwindigkeit am Boden ist in rot abgebildet, für diesen Flug gingen diese Daten jedoch verloren.
Unten rechts:Die Stärke des Magnetfeldes im Verhältnis zur Nennstärke des Magnetfeldes (gestrichelte horizontale Linie).
Der interessanteste Flugabschnitt dieses Videos liegt zwischen Minute 7 und 9. Wie schnell sich die Windgeschwindigkeit ändert, ist am Schattenwurf der Rotorblätter zu erkennen, die vor der Drohne vorbeiziehen.
Anschließend wurde der Windsensor FT742-SM kopfüber am Flugsystem T50 unterhalb des Rumpfes angebracht. Um sicherzugehen, dass der Sensor in dieser Position brauchbare Daten liefert, wurden wiederholt Flüge bei unterschiedlichen Windbedingungen unternommen.

Die Daten der folgenden Kurven stammen von einem Flug bei ziemlich starkem Wind, der am Boden mit durchschnittlich 8 m/s gemessen wurde. Da es schwierig war festzustellen, inwieweit der Windsensor den Umgebungswind misst und nicht nur die Turbulenzen des Flugsystemrotors, wurde das Flugsystem im Schwebeflug (d. h. in stehender Position) betrieben und der Kurs mehrmals geändert. Wenn die gemessene Windrichtung einigermaßen stabil war und mit dem Kurs des Flugzeugs korrelierte, konnte man höchstwahrscheinlich auch der gemessenen Windgeschwindigkeit trauen. Die Kurve links zeigt den Kompasskurs des Flugsystems im Vergleich zur Windrichtung gemessenen durch den FT-Sensor. Die Kurve rechts zeigt die dazugehörige gemessene Windgeschwindigkeit. Da die Korrelation in der Tat recht eng war, wurde davon ausgegangen, dass auch die angezeigte Windgeschwindigkeit einigermaßen genau war. 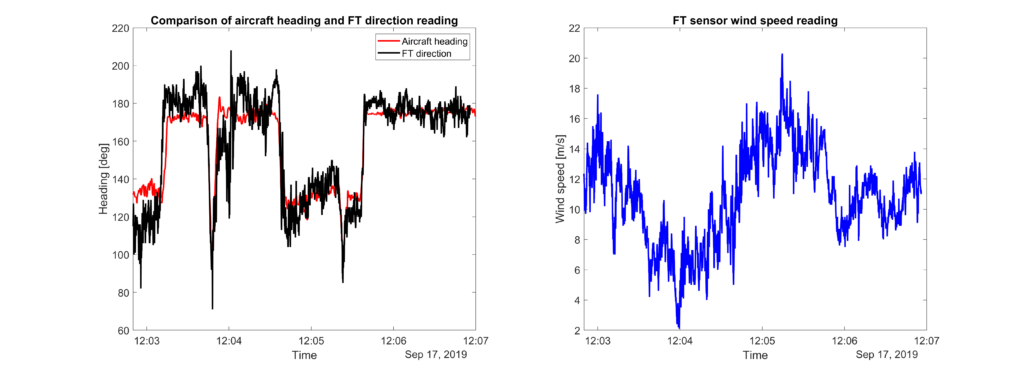
Das Video unten zeigt den Flug aus Sicht einer Bodenüberwachungskamera. Die in der Kurve oben dargestellten Daten beginnen im Video bei Position 4:07. Die starke Richtungsänderung bei 12.03.50 in der Kurve ist im Video bei 5:05 zu sehen.
Schlussfolgerung
„Der FT742-SM hat sich für Windmessungen auch dann als sehr nützlich erwiesen, wenn er unten am größeren unbemannten Flugsystem angebracht ist. Wir planen, den Sensor auch bei künftigen Flügen weiterhin zur Bestimmung der Windgeschwindigkeit und -richtung zu nutzen, speziell bei längeren Flügen jenseits der Sichtweite, wo es darauf ankommt, die für das Flugsystem spezifizierten Vorgaben für Einsätze unter Starkwindbedingungen nicht zu überschreiten.“
Anders la Cour-Harbo
Ausserordentlicher Professor, Dipl. Mathematiker, Promotionsleiter, Drone Research Lab
Universität Aalborg (AAU)
Dänemark